
Principal Research Engineer
Huawei Munich Research Center
Email: firstName.lastName (at) live.com
Bio , CV , LinkedIn , Google Scholar
Huawei Munich Research Center
Email: firstName.lastName (at) live.com
Bio , CV , LinkedIn , Google Scholar
Research interests
- Wireless communications
- Vehicular communications (V2X)
- Resource allocation
- Channel modeling
- Reinforcement learning
GEMV2: Geometry-based Efficient propagation Model for V2V communication
|
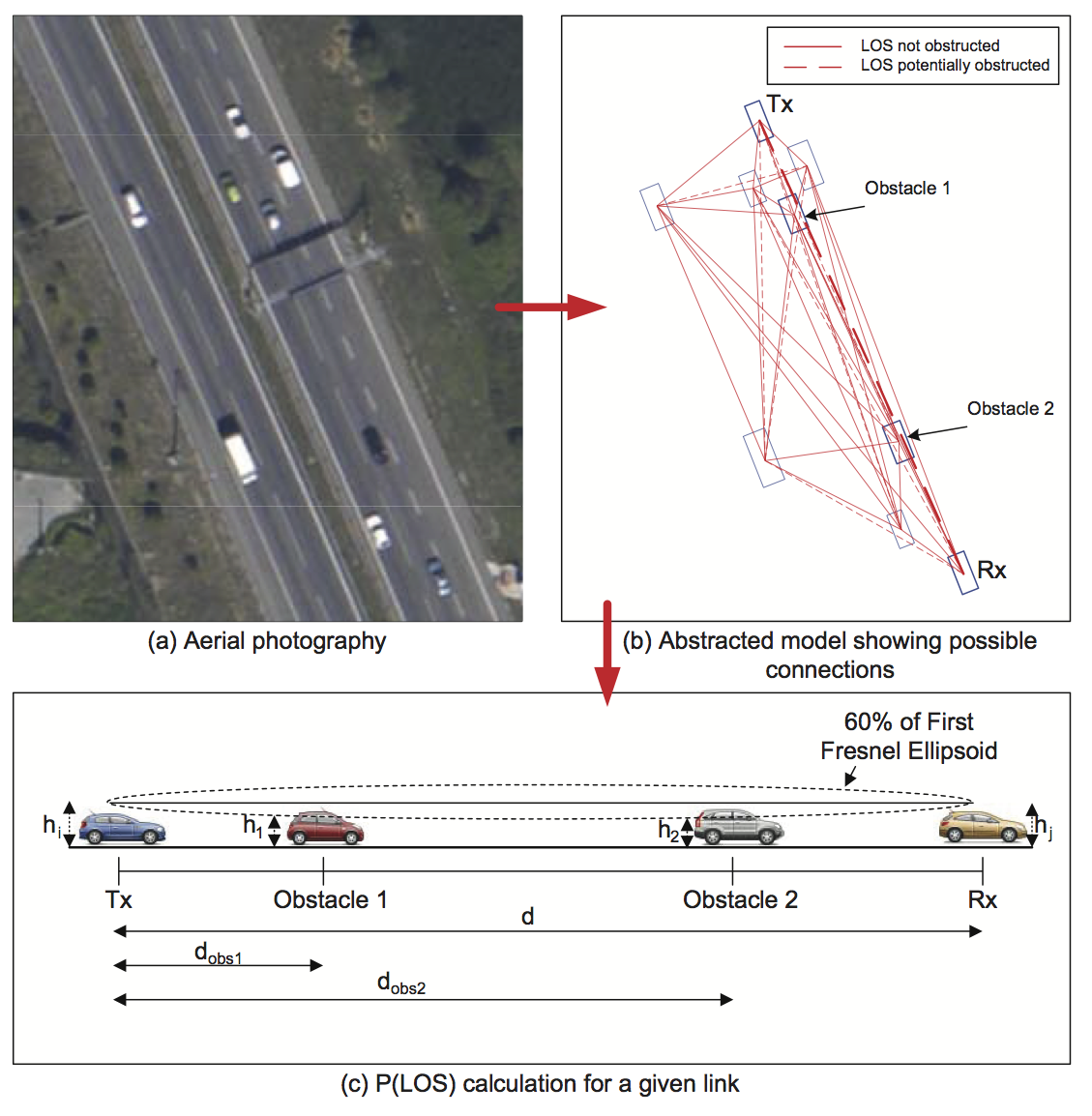
GEMV2 (short for Geometry-based Efficient propagation Model for V2V
communication) is an efficient vehicle-to-vehicle (V2V) propagation model for city-wide
vehicular network simulations. GEMV2 uses outlines of vehicles, buildings, and foliage
to distinguish the following three types of links: line of sight (LOS),
non-LOS due to vehicles, and non- LOS due to static objects. For each
link, the model calculates the large-scale signal variations
deterministically, whereas the small-scale signal variations are
calculated stochastically based on the number and size of surrounding
objects. GEMV2 is validated against extensive measurements performed in urban, suburban, highway, and open space
environment. It is implemented in MATLAB and is able to simulate city-wide networks with tens
of thousands of vehicles on commodity hardware. Download the source code of GEMV2 from vehicle2x.net | [IEEE TVT] |
Vehicle-to-Vehicle Line of Sight Channels
| We analyzed the properties of line of sight (LOS) channels in vehicle-to-vehicle (V2V) communication. We used V2V measurements performed in open space, highway, suburban, and urban environments. By separating LOS from non-LOS data, we showed that a two-ray ground reflection path loss model with effective reflection coefficient range fits the LOS channels better than the frequently used free space path loss model. Two-ray model is a better fit not only in open space, but also in highway, suburban, and urban environments. We investigate the impact of using the modified two-ray model on the application-level performance metrics: packet delivery rate, throughput, latency, and jitter. Our results show that considerable differences arise in application performance when using two-ray and free space channel models. | [ACM VANET '13][CMU T-SET Tech. Rep.] [Experimental Data (email for password)] |

Tall Vehicle Relaying
| Tall vehicle relay (TVR) heuristic counters the shadowing induced by vehicles in inter-vehicle communication. TVR is based on the measurements we collected using passenger vehicles and commercial vans. Our measurements showed that, due to advantageous position of the antennas, tall vehicles experience significantly better channel characteristics. By employing TVR, significant benefits can be obtained in terms of the received signal power, since tall vehicles are less susceptible to shadowing from other vehicles than shorter ones. Based on measurements on highways and simulations performed using a realistic channel model, we showed that TVR can increase the effective communication range up to 50% and reduce the number of hops from sender to destination. | [IEEE TMC - arXiv][IEEE VNC '11 | Slides] [Experiment Visualizer: 1-hop, 2-hop] [Experimental Data (email for password): 1-hop, 2-hop] |

Enhancing Information Dissemination in Vehicular Networks Through Visual Cues
| The common wisdom regarding enabling safety applications in vehicular networks was that all (or nearly all) vehicles need to be equipped with radio communication equipment. We designed an application that enables life-saving functionalities when only a fraction of the vehicles are equipped. By using visual cues on the equipped vehicles, such as specific patterns of hazard warning lights, we showed that a radio penetration rate of 30% is sufficient to inform more than 95% of drivers about the hazardous situation in a timely manner. We validated the realism of our solution using aerial photography datasets collected on highways. | [IEEE Comm. Lett. '12] |

Modeling Vehicles as Obstacles in Vehicular networks
| Existing channel models consider the vehicles as dimensionless entities that have no influence on signal propagation. Using a testbed composed of five networked vehicles, we performed isolated (parking lot) and on-the-road experiments. Our results showed that a single van located between two passenger cars can cause more than 20 dB attenuation of the signal at the receiver. Consequently, we designed a computationally efficient channel model that incorporates the effects of obstructing vehicles. The model accounts for vehicles as three-dimensional obstacles and takes into account their impact on line of sight obstruction, received signal power, and packet reception rate. We validated the model against parking lot and on-the-road measurements. | [IEEE JSAC '11][IEEE VNC '10 | Slides] [Experiment Visualizer] [Experimental Data (email for password)] |
Multiplayer Games in Vehicular Networks
| We investigated the feasibility of multiplayer games in the challenging vehicular environment. We analyzed the available empirical data on travel and traffic volume, and pointed out the most important challenges that have to be met in order to enable multiplayer games. We then proposed a new paradigm for multiplayer games, where a shift is made from a virtual world to an augmented reality world surrounding the traveling vehicle. By utilizing the information about the physical characteristics of the network (e.g., connection duration prediction, location awareness, interactive surroundings, etc.), games can make use of the dynamic vehicular environment, while adapting to its inherent constraints. | [Ad Hoc Networks '10] |
